



Project
Objectives
HASAMé will propose new solutions to create Surfaces that integrate a compelling Haptic Feedback
Our daily life has seen the touchscreen emerge, as a cost-effective input device. Physical knobs, buttons or keyboards are replaced by dynamic visual feedback on a screen. As a result, vision becomes more predominant in the interaction, which leads to several disadvantages: they complicate the lives of visually impaired people, and they pose serious safety concerns in automotive application for instance.
This context legitimates a huge interest in outperforming the existing haptic feedback solutions, in order to play the role of catalyser and thus enabling products that are more
inclusive (for the visually impaired and the elderly), smarter and safer (for the automotive industry for instance ) and more interactive. The project will address haptic feedback on different surfaces: OLED displays, since this technology is expected to account for more than 80% of the smartphone display market share by 2026, and other non transparent surfaces with complex 3D geometries that are named smart surfaces, and which can be used in automotive applications.
3 challenges have been identified for that purpose:
- Challenge 1: HASAMé will design new Human Computer Interactions (HCI) that take benefit of a mixed stimulation based on texture and button click simulations.
- Challenge 2: HASAMé will design back layers to the surfaces that can modify its ultrasonic behaviour to match the needs of the application.
- Challenge 3: HASAMé will develop programmable locally resonant metamaterial in order to ensure the versatility of haptic devices, the robustness of the stimulation and the sensing of key variables.
Research
HASAMé is a multidisciplinary project, where outcomes in the field of physics, engineering, psychophysics and computer science are expected. The interactions depicted, between researchers from different areas, will promote new ideas and nurture creativity. For instance, the structures proposed in HASAMé should be able to achieve an adequate haptic
feedback with respect to the applications, leading to innovative designs. Conversely, new stimulation patterns can emerge from the possibilities offered by new structures, like merging a texture rendering with a vibrotactile stimulation.
These interactions will be made easier in the project by implementing a mechatronic approach, that will unite the aforementioned fields in order to design more reliable and versatile systems. For instance, haptic systems that can sense and stimulate simultaneously will emerge from this approach.
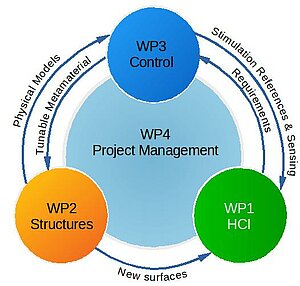
WP1, Human Computer Interactions (lead by LGF): Psychophysical studies will be conducted in order to define the stimulation thresholds for button click. It will also be a question of providing a correspondence between the levels of stimulation obtained with the devices produced by WP2 and the standards used by the community to describe the mechanical buttons. Finally, HCI that takes benefit of the combination of USF with texture rendering will be evaluated on touchscreens and other surfaces.
D1.1a Methods of sensory evaluation of buttons
D1.1b Recommendation towards WP2 for Action/Perception consistency
D1.2a Sensory ratings of the HASAMé devices (ongoing)
D1.2b Set of specific sensory descriptors adapted to the HASAMé devices
D1.3 Demonstrator of User interaction on smart surfaces.
WP2, Structures (lead by Hap2U): This WP will develop the theoretical tools that will help us to design the back layers of the tactile stimulators, and also the technological bricks to realize them. Metamaterials will be introduced gradually: First, in order to confine vibration modes in specific location, a typical requirement for smart surfaces, taking advantage of the numerous advances in this domain. Then the metamaterial will be made more and more active, thanks to the development of WP3, in order to combine the actuation and the modal confinement in a single layer, as it is the main goal of HASAMé. This process will also be applied to superimpose two vibration modes enabling USF.
D2.1a Passive Metamaterial for confining vibration on a smart surface
D2.1b Passive Metamaterials for superimposing modes on a smart surface
D2.2a Simulation of tunable metamaterial for haptic application
D2.2b Tunable metamaterial
D2.3a HASAMé applied on OLED Display
D2.3b HASAMé applied on a complex 3D smart surface from automotive application
WP3, Control (lead by L2EP): The mechatronic approach developed by our consortium for piezoelectric systems has been successfully applied to control the resonant frequency of resonators, to increase the robustness of vibration velocity, and to give our device sensing capabilities. This knowledge will be applied within the domain of metamaterials, to make them tunable for WP2. The solutions that will allow the control of several piezoelectric actuators will be implemented and will produce calibrated stimulations, which is a requirement for WP1.
D3.1a Framework for controlling stimulus
D3.1b Control of passive metamaterial
D3.1c Control of active metamaterial
D3.2 Simulation of distributed actuation
D3.3 Capaility to sense from actuation signals